|
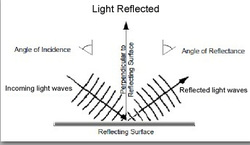
What is LiDAR?Light Detection and Ranging is used to detect and measure the distance of an object or surface from an optical source. LiDAR differs from photogrammetry in that photogrammetry uses passive light and LiDAR employs an active laser system. LiDAR yields an intensity with the XYZ data to provide a black and white-like image. Wikipedia About LiDAR LiDAR Training Introduction to LiDAR What are LAS or LAZ files |

What is static scanning? Static scanning is performed from a stationary position. The scanner remains located at a fixed position with only the scanner head moving. Range and perspective are therefore limited.
|
What is mobile scanning?Mobile scanning integrates laser scanning onto a moving platform and provides geo–referencing per each scan point typically by an Inertial Navigation System. There are many advantages over static scanning including speed, safety, better access (river access), non-invasive, etc.
|

What are some key advantages of MMS?
|

Are there any disadvantages of MMS?
|

What are the advantages of ScanLook?
|

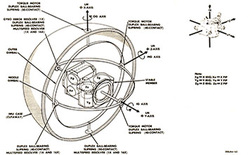
What are the key components to any MMS?
|

What services does LiDAR USA offer?Our top priority is developing ScanLook to be the most versatile, flexible, portable, affordable, near–range mobile mapping system.
Through a network of service providers, we will deploy ScanLook for any scanning job in the U.S. or world–wide. We do photogrammetry as well. |
What are some applications of LiDAR?
|
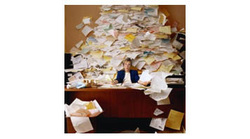
Is too much data a big problem?Many would argue that MMS can collect too much data. Consider aerial LiDAR – automation is severely limited due to lack of sufficient point density. In MMS, the drastically increased point density allows for a lot of automation. This includes location of utility poles, lane markers, curb and gutter work, etc.
|
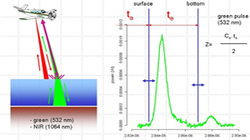
What about scanning through water?Often we are asked about LiDAR systems to scan the bottoms of water bodies. Usually this is understood as airborne LiDAR bathymetry but it could be from a boat as well. These systems are generally quite expensive (more than $1,000,000), large, and power hungry. They use infrared and green light waves to detect the water surface and floor, respectively. In clear water depths of 50 meters are possible.
The new Riegl BDF is the first commercially available UAV solution. While far less than other systems, it is still quite expensive (upwards of $200,000). To learn more simply search for "Bathymetric lidar" on the internet. |
What software do you recommend?The software for feature extraction is changing rapidly. No single solution does everything, at least not easily or affordably. There are a lot of good products on the market and many are specific to a particular application. Some are easier to user than others and some have many more features than others. Handling several billion points is a necessity. Google something like "lidar processing software" to see the large variety of packages available. Definitely attend more than one conference for some exhibit floor demos.
|
Problems using RTK for Mobile MappingRTK is great for surveying, why not mobile mapping?
The advantages are real-time display, saving 15 minutes office time post-processing, and $10k to $15k on software. |

Using ScanLook on the WaterScanning from the water is not much different than from scanning from a car. Initializing the INS remains a critical factor and varies with the system. ScanLook is designed to be so portable that it can be used on a car, cart, rail, boat, and UAV all easily within the same day. Due to the small size and weight, it is even possible to use a helikite pulled behind a boat to scan from an aerial perspective without a UAV, etc. giving richer data over the riverbank, tree line, etc.
Click here for more information on using ScanLook on the Water |
Temperature ExtremesMost of the ScanLook components are rated for –10C to 40C (14 to 104 deg F). The cameras can work in much colder weather and up to 125F.
The scanners are the most sensitive components. Heat is the the hardest to overcome. We have worked ScanLook at 100 to 106F for hours with no problem. Cold just requires warming the instruments or use of a heating blanket if possible. Exposure to cold wind will necessitate short sessions between warmups. Cold also drains the battery quicker. Remember, with good planning 15 minutes can collect a lot of data even in extreme climates. Hot desert climates (over 105F) should be handled with caution. |

ScanLook Output FormatsScanLook supports the following formats:
Image Data:
More file formats will be added as needed. |

Highest Accuracy – How Do You Get It?Can ScanLook match a terrestrial laser scanner for accuracy? Yes and No.
How is that possible?
|
What’s this talk about Hz?Most literature refers to scanning rate in terms of “Hz” (i.e. hertz). Hz is the unit of measure in cycles per second of a regular phenomenon. Generally it is used to describe two separate scanner characteristics.
|
How to choose the right IMUIf using ScanLook for mobile scans along the roadway, you can expect GPS outages. In this case, the better the IMU the less drift and the better your trajectory and resulting point cloud. If you expect GPS outages over 10 seconds then you need a better IMU for improved results otherwise the more affordable IMU's will work just fine. Most results can be improved by using control points as well.
|
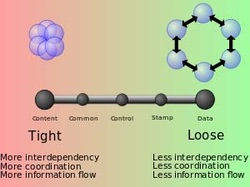
INS Processing – What is LC vs TC Mode?The GNSS and IMU data collected while scanning must be combined to compute the best estimate trajectory using one of two modes: Loosely Coupled (LC) or Tightly Coupled (TC). LC mode solves for an optimal GPS solution (XYZ) and then combines with IMU processing. TC mode solves both GPS and IMU processing simultaneously.
Solving with LC helps detect errors by separating the data. TC processing limits inertial error growth, using phase updates and ZUPT detection, in even minimal GPS configurations as often found in mobile mapping. Ultimately you should use a TC Smoothed solution. |

Multi-pass INS ProcessingMulti-pass processing (in Inertial Explorer) passes the converged Kalman filter states from one direction to the next. This allows for essentially a 6-pass solution instead of 2 with forward processing computing a fwd-rev-fwd solution and reverse doing rev-fwd-rev.
While most useful for PPP applications, it could be critical for marine applications with low dynamics. Generally multi-pass is likely to be the optimal solution. |
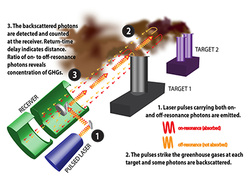
What is DIAL?Note: we are not in the DIAL business.
What is it? Differential Absorption LiDAR. DIAL uses two or more wavelengths to ultimately determine the concentration of specified gasses in the atmosphere. Please refer to https://en.wikipedia.org/wiki/Lidar or http://www.nist.gov/pml/div682/lidar.cfm |
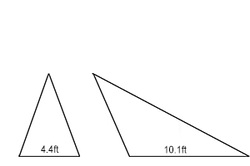
Why Tilt the scanner on a car?If the scanner is mounted horizontally (that is so the central laser is scanning up or down) then the scanner covers a smaller area per revolution. Moving at 50mph translates to 73 ft/s and at 20 Hz this means the vehicle moves 3.65 ft/revolution. If the scanner is mounted 6 ft above the ground and looking straight down with a 40 degree FOV it covers 4.4 ft but if tilted 45 degrees it covers 10.1 ft. At 50mph there is overlap between scans, but not much and that assumes the scanner is far enough from the vehicle to not block some of the lasers.
|

Using a Gimbal with the ScanLook SystemIt is possible to use a gimbal with ScanLook if post processing with NovAtel Inertial Explorer. The SPAN system must be setup to log the gimbal values from the gyro mount which are then used to correct the change in IMU->GPS offset. Like every instrument the wiring and SPAN commands must be setup properly for this to work.
Not all systems support this feature. |

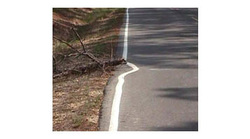
ShadowingShadowing is the inability to see or scan objects behind foreground objects. For instance, a car parked along a street can completely hide a piece of furniture (bench, flower pot, fire hydrant, stairwell) or definitely a curb. Single line scanner systems are very susceptible to such occlusions. Even a dual scanner/butterfly configuration can significantly reduce this affect and a multi-laser system does so even more and this is where such systems really shine.
Click here for shadowing information. |
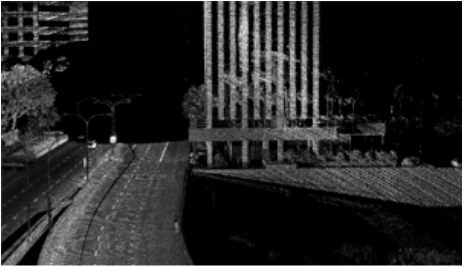
Scanning RangeThe importance of scanning range varies with the project. Scanning roadway assets generally doesn't require much more than 30 to 40 meters. Scanning billboards might require 60 or more meters. Scanning for topography from a car at 2 to 2.5 meters most often reaches its limit at 30 to 35 meters (because of ground undulation). When would 100+ meters be nice? Scanning for cityscape's, looking for possible shooter positions, high dams, tall bridges, across valleys or rivers, or from a UAV.
Click here for Scanning Range information |
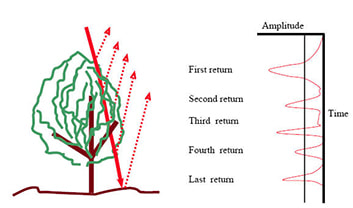
Multiple return LiDAROff-site article: Multiple return LiDAR
|

Suggested Targets
Here are suitable targets for roadway mapping not to exceed 45mph. The legs of this target are over 24 inches and the width is over 4 inches.
|

Useful Links |
